![]()
KÖZELEBB HOZZUK A JÖVŐT!
+36 20 312 0211
Email: info@3dgeosolutions.hu
3D Geosolutions Hungary Kft.
1106 Budapest, Tündérfürt u. 3-5.
(Eltec Business Park)
A GNSS technológiában mindig is vezető szerepet betöltő, igen régre visszanyúló tapasztalatokkal bíró és egyben kimagasló felmérési szakértelemmel rendelkező Trimble megbízható, innovatív GNSS megoldásokat nyújt a legkülönbözőbb igényekre. Több mint 30 évvel ezelőtt a GNSS technológia kifejlesztésével a Trimble új mércét állított a helymeghatározásban és egyben új utakat nyitott a földmérőknek a hatékony és nagy pontosságú terepi adatgyűjtésben — és a tradíció folytatódik… ma és holnap egyaránt.

Több mint 30 éve a Trimble kifejlesztette a GNSS technológiát, amely új utakat nyitott a földmérőknek a hatékony és nagy pontosságú terepi adatgyűjtésben.
PONTOSSÁG ALAPÚ megközelítés, nincs többé FLOAT–FIX (LEBEGÓ–FIX) megoldás!
A Trimble HD-GNSS™ technológia az összes lehetséges fázistöbbértelműségi kombinációt folyamatosan figyelembe veszi és számítja, új dimenzióba helyezve a GNSS alapú helymeghatározást!
A Trimble HD-GNSS jelfeldolgozás lényegesen pontosabb hibabecslést nyújt, mint a hagyományos GNSS számítási módok, különösen igaz ez a fedettebb és városi környezetekre. Egyben jelentősen csökkenti az inicializálási időt, és növeli a mérések pontosságát és megbízhatóságát, hogy ne kelljen aggódnia mérése helyességén!
KATTINTS TOVÁBB, MEGTUDHATOD, HOGYAN MŰKÖDIK!
PONTOSSÁG ALAPÚ megközelítés, nincs többé FLOAT–FIX (LEBEGÓ–FIX) megoldás!
Hogy megértsük a HD-GNSS működését és a teljesen új megközelítését, át kell futnunk a hagyományos FLOAT–FIX megoldás lépéseit.
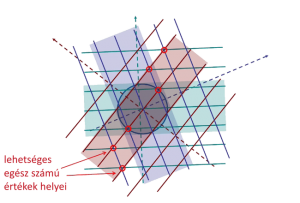
A LEBEGŐ-FIX inicializálási folyamat leegyszerűsítve, 1D és 2D-re vetített ábrákkal illusztrálva:
A hagyományos eljárás során a vevők először a fázistöbbértelműség feloldását lebegőpontos (floating point) számmal kísérlik meg, innen a FLOAT SOLUTION, azaz a LEBEGŐ MEGOLDÁS. A legtöbb esetben az első becsléshez a –lényegesen pontatlanabb– kódmérést (is) felhasználják a vevők.
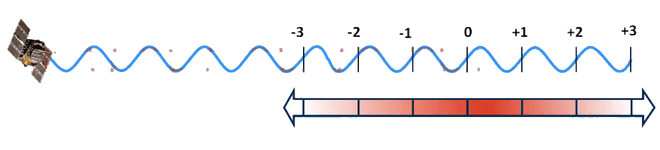
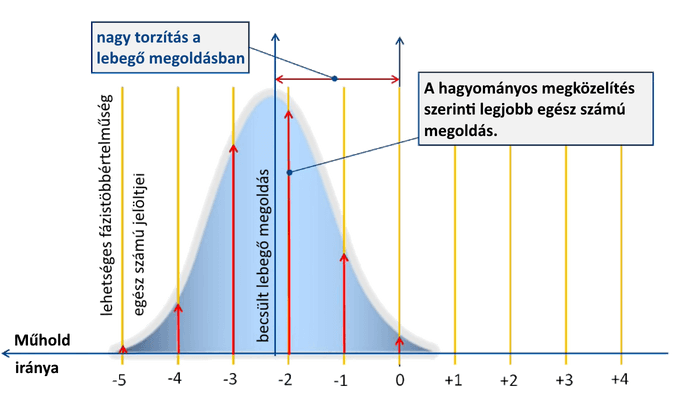
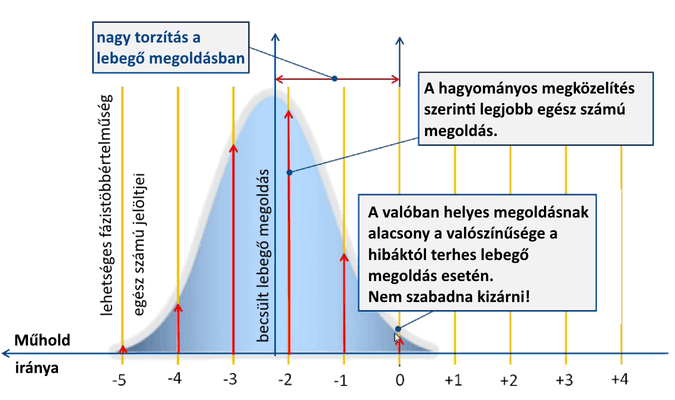
Az első műholdról érkező jel egész fázisai a piros vonalak és a prios terület jelzi a lebegőpontos megoldás keresési helyét.
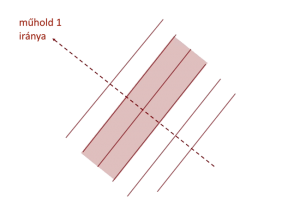
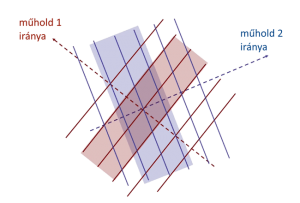
A második műhold képét levetítve, kék vonalakkal jelölve a lehetséges egész értékeket és kék területtel a lebegő megoldás területét.
A harmadik műhold esetén ugyanígy... és folytathatnánk a sort.
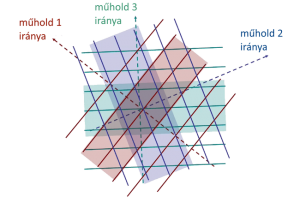
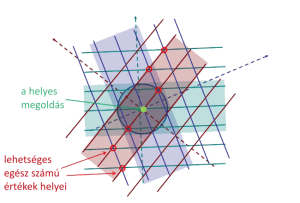
A kék körvonalú körrel határolt terület jelzi a lehetséges pozíció lebegőpontos keresési területét (FLOAT megoldás). A pirossal jelölt metszések a lehetséges jelöltek a helyes (FIX) pozícióra.
A FLOAT-FIX megoldás során végeredményben a vevő a lebegőpontos keresési területről választja ki a legvalószínűbb, legjobb becslést adó egész számú metszési helyet és erre végzi el a számításokat. Amennyiben a feltételek teljesülnek a választott jelöltre, úgy FIX-re vált és a fázistöbbértelműséget feloldja. Ezt látjuk zöld színnel jelölve.
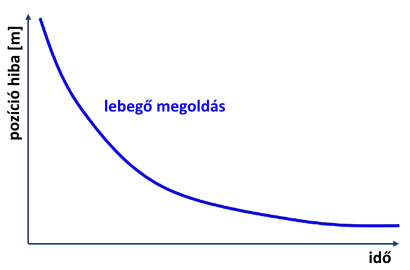
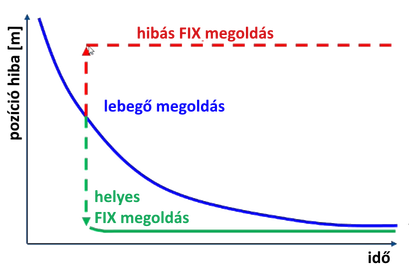
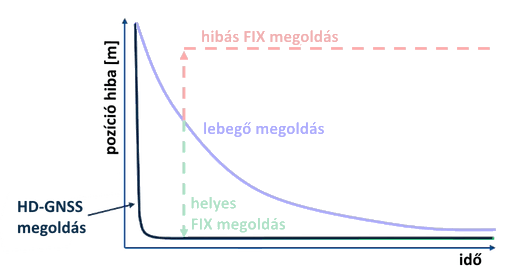
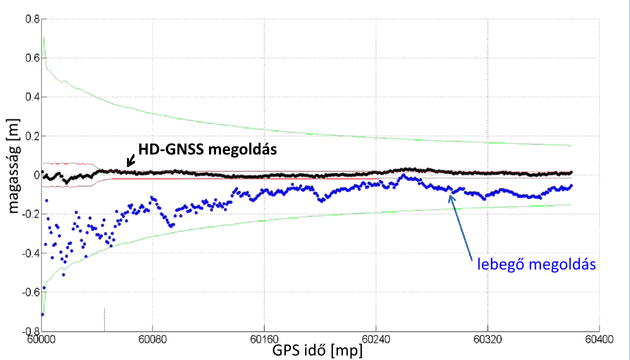
Az alábbi ábrán a függőleges tengely a pozíció hibát, míg a vízszintes tengely az időt jelöli. A lebegő megoldás –ahogy ezt tapasztalhatjuk is minden esetben a terepen– az idő előrehaladtával egyre pontosabb értékeket mutat. Valójában a vevő választ egy lebegőpontos keresési területet és ezen belül keresi a megfelelő FIX megoldást. Ilyenkor minden a területen kívül eső információt kizár!
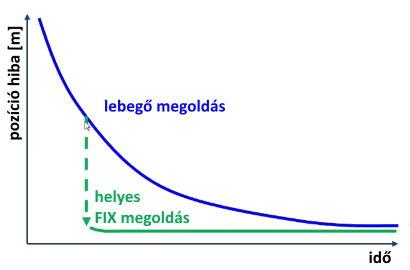
A sokadik keresési terület választásakor, illetve az azon belüli számításkor egyszer csak megjelenik a FIX megoldás és ugrik egy nagyot a pontossági kijelzés (zöld színnel jelezve).
Megtörténik a fázistöbbértelműség feloldása minden műholdra, megtörténik inicializálás.
Azonban a nehéz körülmények közt, amikor a fázisadatok komoly hibákkal terheltek (pl. többutas terjedés miatt) az eleve hibásan becsült FLOAT megoldás könnyedén eredményezhet hibás FIX megoldást, amelyre cm pontosságot fog kijelezni, de valójában akár méteres hibákkal terhelt pozíció! Ez látható pirossal:
Összességében a LEBEGŐ-FIX megközelítésnek az alábbi jellemzőkkel rendelkezik:
Ezzel szemben a HD-GNSS megoldás...
A HD-GNSS számítási eljárás ettől teljesen különbözik! Ez a technológia a legkorszerűbb eljárás jelenleg!
Mindezek előfeltétele a nagy teljesítményű mikroprocesszorok jelenléte!
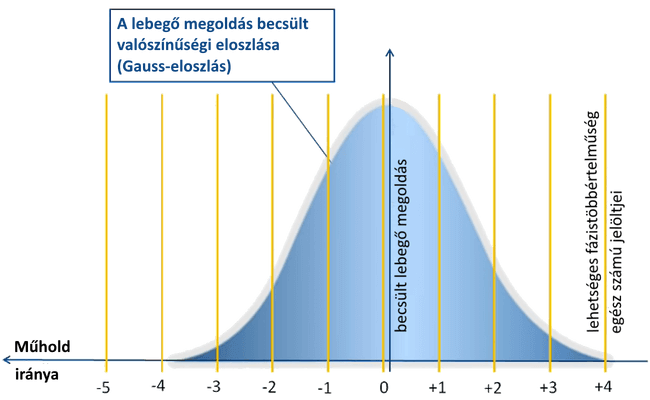
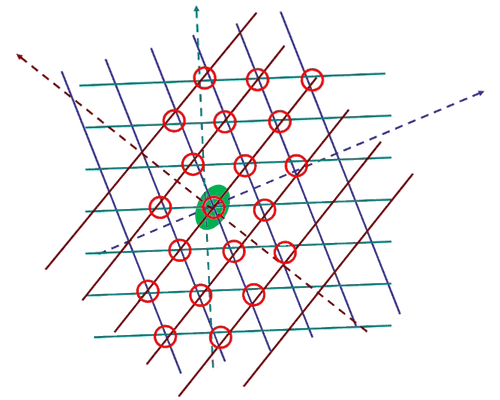
Az alábbi ábrán azt láthatjuk, hogy egy műhold esetén a távolságszámítás miképp történik:
A kékkel jelölt, Gauss-eloszlást mutató terület (azaz normális eloszlási görbe) alatt látjuk a lehetséges megfelelő fázisértéket.
A sárgával jelölt vonalak mutatják az egész számú fázisértékeket. Ezek mindegyike lehetséges jelölt, így ezek mindegyike számítás alá lesznek vonva a HD-GNSS megoldás során. A legmagasabb értéknél találhatjuk a legvalószínűbb megoldást.
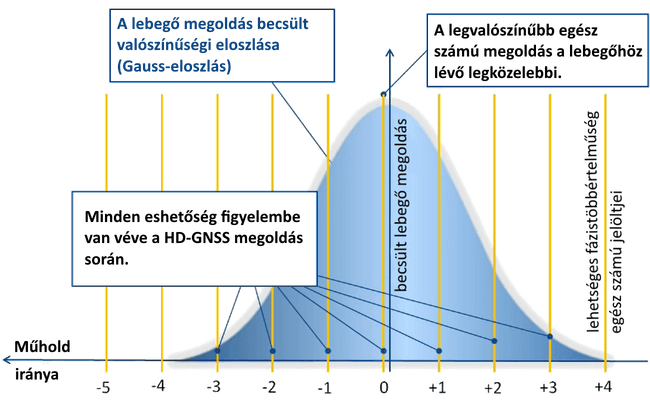
Egy példán keresztül szemléltetve, amikor normál körülmények vannak:
Itt a hagyományos LEBEGŐ-FIX megoldás valószínűleg gyorsan helyes eredményt biztosít, hiszen a helyes fázistöbbértelműség a FLOAT megoldáshoz legközelebb álló lesz.
AZONBAN...
...vegyünk egy olyan tipikus példát, amikor a fázisadat hibákkal terhelt (pl. többutas terjedés vagy magas ionoszféra hatás miatt):
Azaz adott egy jelentős hibákkal terhelt fázis adat, ahol a valódi fázistöbbértelműséget megadó egész szám nem a FLOAT (lebegőpontos) megoldáshoz legközelebbi...
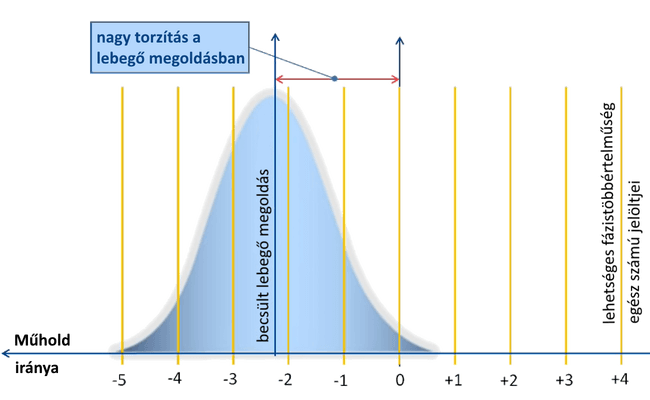
A FLOAT megoldási megközelítés jó eséllyel –de legalábbis a számítások elején biztosan– a -2 -nél található egész számot fogja FIX megoldásúnak, illetve legnagyobb esélyűnek tekinteni.
Azonban a valós és helyes egész számú érték nem ez, hanem a nagyon kis eséllyel vett 0 értéknél található. EZT NEM SZABADNA KIZÁRNI! A HD-GNSS nem is teszi!
Ahogy látható az alábbi képen, egy időben az összes lehetséges megoldás számítás alá van vonva. A széleskörű mintavételezés eredményeképpen a végső, helyes eredmény is már egy nagyon pontos megbízhatósági értékkel bír.
Azaz HD-GNSS esetén minden egyes szóba jöhető egész szám számítás alá van vonva, ami egyben igényel egy a szükségesnél szélesebben meghatározott (ún. túldeterminált) alapadatfelvételt a kereséshez, hogy mindenhol a korrekt és megfelelő minőségű értékekkel tudjon szolgálni.
A fő különbség a két metódus között, hogy míg a hagyományos FLOAT-FIX megoldás mindig egy választott területen belül keresi az eredményt lebegőpontos számítások közelítésével, addig a HD-GNSS megoldás egyszerre az összes lehetséges ("FIX") jelölt bevonásával, statisztikai eljárással oldja fel a fázistöbbértelműséget, mely számítást ráadásul folyamatosan fent tart, teljesen dinamikussá téve az egész folyamatot.
A HD-GNSS számítási eljárás pillanatok alatt nagy és megbízható pontosságot ér el!
Egy 6 perces időszakaszon látjuk összehasonlítva a két eljárást valós és nehéz, fedett körülmények közt:
Összességében:
A Trimble 360 egy fejlett és erőteljes GNSS vevőoldali technológia, amely biztosítja a rendszer számára az összes jelenlegi és jövőbeli GNSS műhold- és kiegészítő rendszer használatát, mint a GPS, GLONASS, Galileo, Beidou (Compass) és QZSS, illetve a WAAS, EGNOS, MSAS és GAGAN rendszerek jelenlegi és tervezett jeleit és kiegészítő szolgáltatásait.
EGY BIZTOS BEFEKTETÉS!
A JELENLEG TÁMOGATOTT JELEK:
| GNSS rendszer | vivőjel |
|---|---|
| GPS | L1, L2, L5 |
| GLONASS | L1, L2 |
| Galileo | E1, E5 |
| Beidou (Compass) | B1, B2 |
| QZSS | L1, L2, L5, LEX |
A Trimble R-Track minden szükséges jelet biztosít. A 220 csatorna bőven elegendő a jelenlegi összes műholdrendszer és jelének megfelelő támogatására. Vevőtől függően akár a GPS harmadik frekvenciája, az L5 is elérhető. Összességében az alábbi műholdrendszerek tartoznak a Trimble R-Track támogatása alá: GPS, GLONASS, Galileo, Beidou, QZSS.
A GNSS modernizációról itt olvashatsz bővebben a Trimble oldalán.
A Trimble CenterPoint® RTX egy globális, valósidejű korrekciós szolgáltatás, amely műholdon és mobiltelefonos kapcsolaton is működik, lehetővé téve a felhasználónak referenciahálózat vagy bázis nélkül a cm közeli pozicionálást valós időben.
A szolgáltatás a GPS és a GLONASS műholdakra vonatkozik.
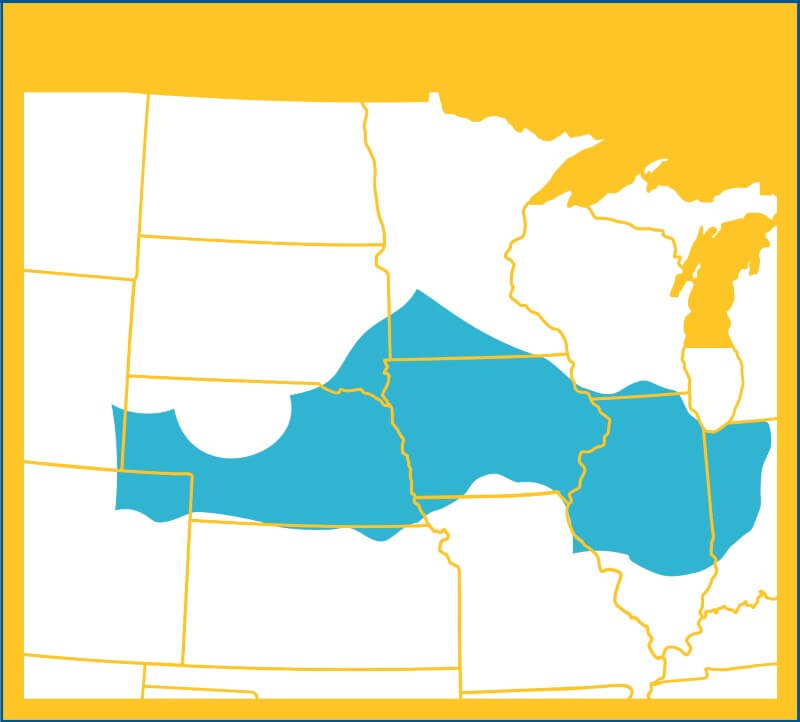
A Trimble CenterPoint® RTX szolgáltatási területe:



A PPP, azaz a Precise Point Positioning (Precíz Abszolút Helymeghatározás) az utóbbi évtized kutatómunka eredménye. A PPP egy alternatívája a széles körben alkalmazott és elfogadott referenciaállomás alapokon nyugvó RTK technológiának. A PPP esetén nem korrekciós adatokat fogadunk egy bázistól vagy egy bázis hálózattól, hanem annál inkább a rendszerben lévő pontatlanságok valós idejű javítására helyezi a hangsúlyt, mint műhold pályaadatok, órainformációk. A PPP előnye a megszokott megoldással szemben legfőképpen a globalitása, hiszen a javított információkat a vevő műholdon keresztül is képes fogadni, így nincs szükség mobiltelefonos vagy más adatkommunikációs kapcsolatra. Hátránya azonban a lassabb inicializálási idő, amely néhány perctől akár több tíz percig is eltarthat annak függvényében, hol vagyunk a világban.
Az RTX mozaikszó a Real Time eXtended szavakból épül fel, azaz Kiterjesztett Valós-Idejű helymeghatározási megoldás a PPP technológiát alkalmazva. Az RTX számos innovatív technikát alkalmaz a valós idejű, cm pontosságú helymeghatározás érdekében, amely bárhol elérhető a Földön. A Trimble CenterPoint RTX jelenleg GPS és GLONASS műholdrendszerekhez szolgáltat adatokat.
A Trimble CenterPoint® RTX működési elve röviden:






A Trimble RTX elsődleges korrekciós szolgáltatása a CenterPoint® RTX, amely 4 cm-nél is nagyobb pontosságot biztosít és elérhető közvetlenül műholdról vagy hagyományosan (mobil)interneten keresztül. Ennél jobb műholdas korrekciós szolgáltatás nincs jelenleg!
A Trimble CenterPoint® RTX legfőbb előnyei:
A Trimble xFill™ egy olyan új PPP (és egyben a Trimble RTX™) alapokon nyugvó technológia, amely a hagyományos földi korrekciós sugárzású bázis- és hálózat alapú RTK technológiát egészíti ki. A Trimble xFill™ műholdas korrekciós szolgáltatás azonnal átveszi a földi sugárzás helyét, amennyiben az késik vagy kiesik az adatkommunikáció megszakadása, rossz minősége miatt. Azaz nem kell azon aggódni, hogy a területen akadozik az internet vagy el-eltávolodunk a rádió hatósugarától, hiszen a Trimble xFill™ alaphelyzetben 5 percig tartja a 4cm-nél jobb pontosságot, míg az Enhanced Trimble xFill™ szolgáltatással akár korlátlan ideig is mód nyílik erre! Természetesen a technológia teljesen automatikus, amennyiben ismét elérhető a földi sugárzás, a rendszer visszatér annak fogadására.
A szolgáltatás a GPS és a GLONASS műholdakra vonatkozik.
A Trimble xFill™ szolgáltatási területe:

A Trimble xFill™ a Trimble RTX™ technológiáján alapszik, mely működését részletesen bemutatjuk a >Trimble CenterPoint® RTX< fejezetnél.
Míg a CenterPoint RTX önmagában egy PPP alapú teljes értékű, elsődleges szolgáltatás, addig az xFill kimondottan egy kiegészítő szolgáltatás a földi sugárzású korrekciós adatok kiesését áthidalandó. EZÉRT:


A Trimble xFill™ úgy segíti a mindennapi munkát, hogy végig észrevétlen próbál maradni és teljesen automatikusan kiegészíti a földi sugárzású korrekciós szolgáltatásokat (mint pl. GNSSNET vagy Trimble VRS Now™). Amint megszakad az adatkapcsolat (internet vagy URH rádió), azonnal átveszi a szerepet a Trimble xFill™ és áthidalja a problémát. A legtöbb esetben a felhasználó nem is érzékel az egészből semmit, csak azt, hogy gond nélkül mér tovább...
A Trimble xFill™ legfőbb előnyei:
A Trimble R10 GNSS vevőben elsőként megjelenő, integrált dőlésérzékelő és magnetométer (elektromos kompasz) segítségével a rendszer mindig pontosan számítja a rúd hegyének koordinátáját, még akkor is, ha a bot nincs függőben. Ez a Trimble SurePoint™ GNSS technológia!
Hiszen a fenti két nagy pontosságú szenzornak köszönhetően egyértelműen meghatározható az antenna fáziscenterének és a rúd hegyének egymáshoz viszonyított térbeli helyzete a földi koordináta rendszerben. A rendszer legfeljebb 15°-os dőlésig használható.
Gyorsabb, pontosabb pontmérést tesz lehetővé és egy újfajta, intuitív mérési módszert biztosít. A Trimble SurePoint™ többféleképpen is segíti a GNSS pont mérést:
A Trimble SurePoint™ nagyobb bizalmat ad méréseinek helyességében és nagyobb biztonságot azok pontosságában!

Trimble SurePoint™
Ennek bedőlhetsz!

az S sorozatú mérőállomásoknál is alkalmazott technológia, amely aktív korrigálással biztosítja a pontos célzást és mérést kisebb mozgások, mint szél, kezelés (pl. erősebb gomb megnyomás) és süllyedés esetére.
GYORSABB MÉRÉS – MEGNÖVEKEDETT PONTOSSÁG – PLUSZ MINŐSÉGELLENŐRZÉS






{kind=link}
{kind=link}
{kind=link}